Home
Free Trial
Home
Free Trial
Read More
Content
Filter
10 results found
Featured
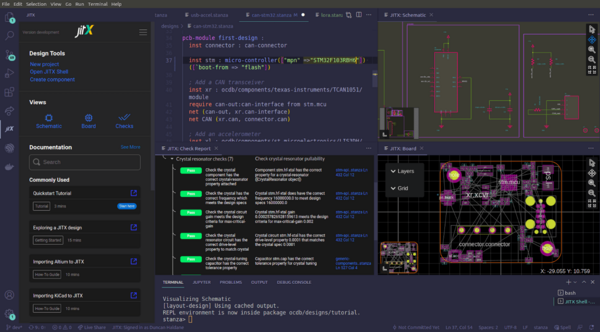
AI in PCB Design: What Works Today and What Doesn’t
Featured
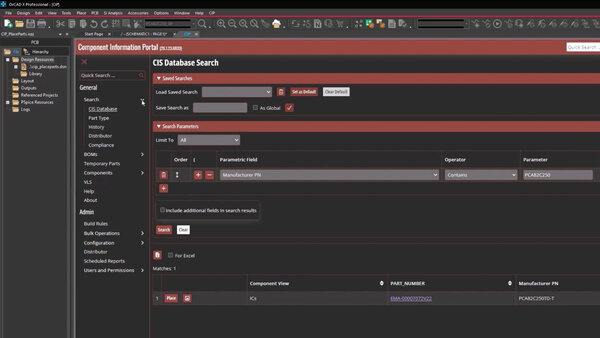
How to Place Parts from a Component Database in OrCAD X CIP
Featured
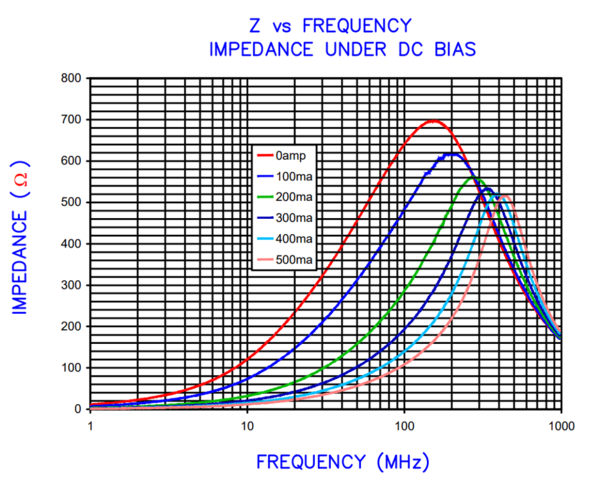
When Do Ferrite Beads Help or Hurt EMI Performance in PCB Designs?
Featured
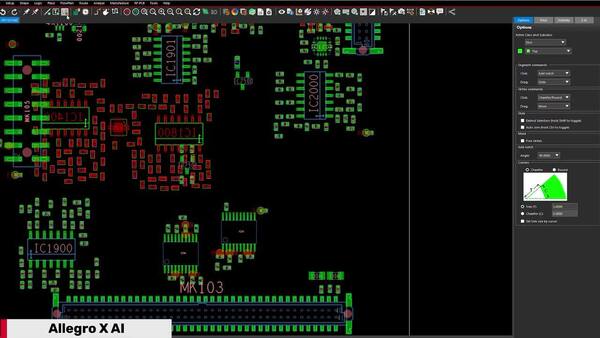
Danfoss Uses Cadence Allegro X AI to Amplify PCB Design for Energy Efficiency
Featured
How to Optimize the Electronic New Part Introduction Process for PCB Design
Featured
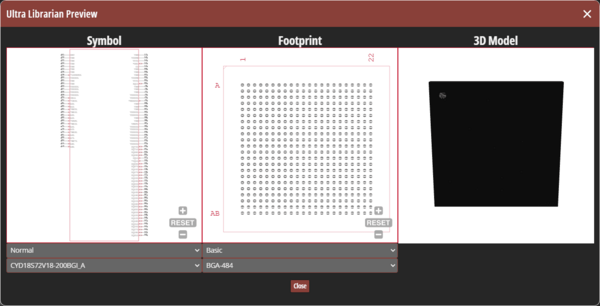
How to Use Verified Symbols, Footprints, and 3D Models for New Components in OrCAD X CIP
Featured
EMI Reduction Techniques for Switching Power Supply PCB Layouts
Featured
PCB Fanout For 0.4MM PITCH BGA Packages
Featured
PCB Fanout For 0.5MM PITCH BGA Packages
Featured
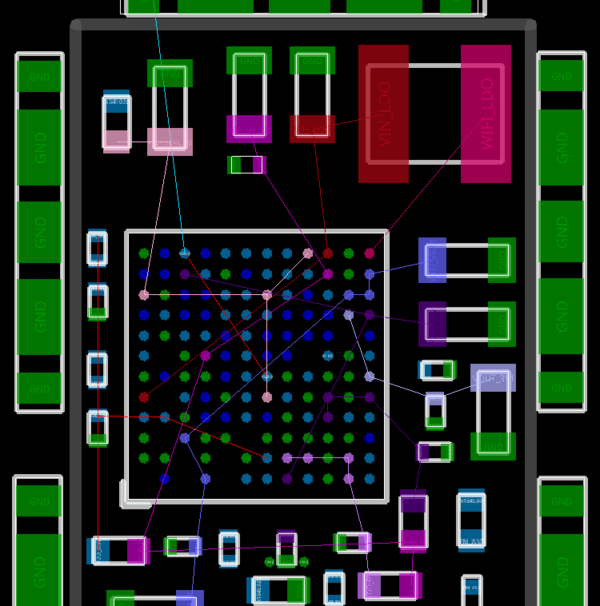
PCB Fanout For High Pin-Count BGA Packages
Featured
Products
None
Allegro X PCB
(2)
OrCAD X
(1)
Allegro X AI
(1)
Solutions
None
Artificial Intelligence
(1)
Library Authoring & Management
(1)
PCB Layout
(1)